

 当前位置:
当前位置:

 推荐产品
推荐产品 





 推荐新闻
推荐新闻  在线留言
在线留言 详情内容
详情内容 皮带输送机作为工业生产中物料输送的核心设备,其稳定运行直接关系到生产效率与安全。然而,皮带跑偏问题始终是困扰行业的痛点,易引发物料洒落、皮带边缘磨损甚至撕裂等事故,不仅增加停机时间与维护成本,更潜藏安全隐患。陕西固博机器人科技有限公司深耕工业智能装备领域,推出的皮带跑偏纠偏预警系统,以自动化检测与校正技术,为输送系统安全可靠运行筑牢防线。
一、..检测:AI 视觉赋能,实时捕捉跑偏动态
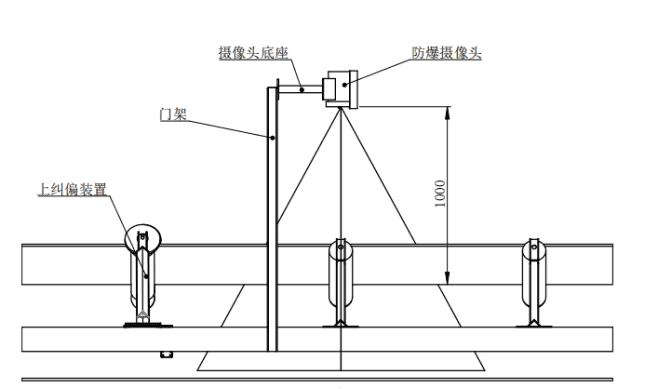
系统搭载高精度工业视觉引导的传送带对中控制系统,通过固定在传送带上方的工业光学相机,持续监测皮带运行状态。依托..的 YOLOv6 深度学习目标检测算法,实时解算传送带相对理论中心线的横向位置偏差,..捕捉皮带边缘的细微偏移。
在复杂工业环境中,即便面临光照变化、皮带表面污渍、物料遮挡等干扰,通过数据增强(调整亮度、对比度,添加噪声模拟)等手段优化后的模型,仍能保持出色的鲁棒性,..检测结果稳定可靠。同时,系统在皮带机头、中部、尾部各部署 1 套高速摄像头,摄像头垂直于激光投影,实现全流程无死角监测。


二、智能预警:分级响应,防患于未然
系统内置 “跑偏量 - 纠偏角度映射模型”,每 1 秒采集 1 次跑偏量、纠偏角度及装置状态数据,以皮带中心线为基准,实现分级预警:
· 绿色正常:跑偏量≤10mm,皮带运行稳定;
· 黄色预警:10mm<跑偏量≤30mm,系统自动提示,提醒运维关注;
· 红色紧急:跑偏量>30mm,触发紧急纠偏,避免事故扩大。
所有数据可存储 1 年,支持按时间、皮带机编号查询,为运维分析提供数据支撑。同时,系统可通过声光等方式提前预警或立即报警,让隐患无处遁形。
三、自动纠偏:闭环控制,..校正偏差
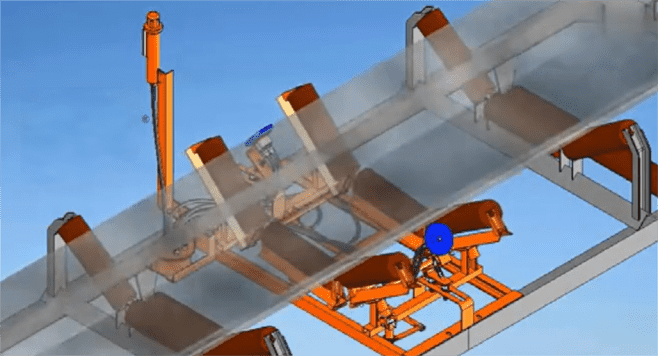
检测到跑偏后,系统通过严谨的坐标转换与控制模型,将像素级偏差量转化为..角度控制指令,驱动电机执行机构调整纠偏托辊角度,利用力学原理动态修正皮带跑偏,实现全自动化、非接触的闭环控制。
纠偏装置支持两种安装方式,适配不同场景需求:
· 上纠偏装置:安装于皮带上方,适用于空间受限或特定工艺布局场景;
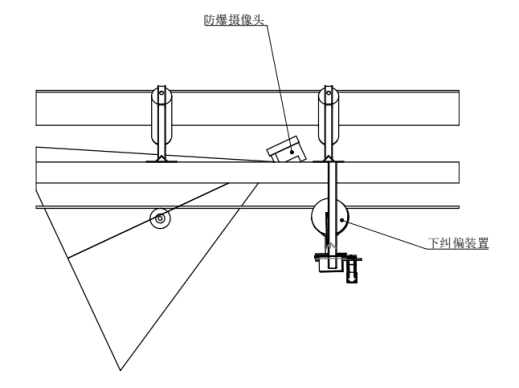
· 下纠偏装置:安装于皮带下方,可有效利用下部空间,不影响上部物料输送。
同时,系统采用多级纠偏策略:轻微跑偏时小幅度校正(一级),严重跑偏时大幅度校正(二级),并可根据皮带跑偏方向双向纠偏,..校正....。
四、智能交互:可视化监控,便捷运维管理
系统通过组态软件和触摸屏等终端,以 “皮带模拟运行图” 实时展示皮带运行状态、跑偏数据和报警信息,支持远程 / 就地控制模式切换。在发生严重跑偏时,系统可联动主输送机控制系统,实现自动减速或停机,并提供紧急停机接口,..程度保障生产安全。
此外,系统还具备智能决策与自适应能力,可基于预设策略或算法处理检测数据,自动决定纠偏方向和幅度,减少人工干预,提升运维效率。
五、应用价值:降本增效,筑牢安全防线
· 降低停机时间:提前预警与自动纠偏,有效避免皮带跑偏引发的故障,减少非计划停机;
· 减少维护成本:降低皮带磨损、撕裂等问题,延长设备使用寿命,减少维修投入;
· 提升安全可靠性:全流程自动化管控,消除人为操作误差,为工业生产筑牢安全屏障。
皮带跑偏纠偏预警系统,以智能技术赋能传统输送设备,助力企业实现..、安全、智能的生产运营。未来,陕西固博机器人科技有限公司将持续深耕工业智能领域,为更多行业提供创新可靠的解决方案。




 营业执照
营业执照
